前言
我的目标是,在连续的两帧影像上,根据前一帧影像的已知直线,在下一张影像上找到对应的直线位置。
假设每一帧影像的标号为1,2,3,4,5…,直线L1在影像1上的位置是已知的,并且在影像2上存在一个缓冲区,影像2上的L1位于这个缓冲区内。
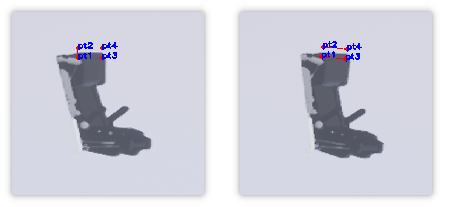
预测缓冲区的方法较为多样。如果已知物体的旋转角速度和运动速度,以及运动相机的运动状态,可以直接计算出目标在影像上的像素偏移量和旋转角度;也可以先对目标进行点匹配,筛选出正确率较高的匹配点,根据匹配点之间的偏移平均值、两个匹配点连成的直线的夹角、均匀分布的匹配点的中心,计算出每一条直线对应的缓冲区的仿射变换(旋转、平移、伸缩)参数,进而预测出缓冲区的位置;或者使用光流法(Optical Flow)进行跟踪和预测,目前正在研究中。
获取缓冲区后,首先对缓冲区进行边缘提取,接着在一系列的边缘点中,提取出目标直线。
在这篇文章中,我将介绍边缘提取方法和基于统计与误差思想的RANSAC直线提取方法。
边缘提取
边缘提取的方法包括:
- 使用一阶微分/二阶微分算子进行卷积运算提取,如:Sobel算子、Prewitt算子、Robert算子、Laplacian算子;
- 使用更加精细化的、可以提取到像素/子像素的方法,如:Canny方法。
考虑到像素/子像素级别的边缘提取方法会导致边缘强度信息丢失,难以进一步提取直线,因此我使用的是可以提取较粗边缘、保留较好强度信息的一阶微分卷积算法(Sobel算子)。
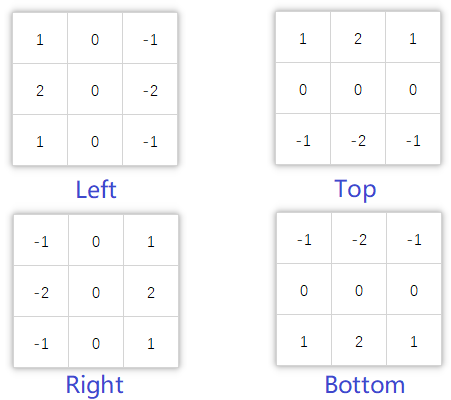
使用四个方向的Sobel算子分别对灰度图进行卷积运算,接着将卷积后的四幅影像取绝对值后相加取平均,得到具有一定宽度和亮度的边缘。
1 | // 用sobel算子提取边缘(四个方向) |
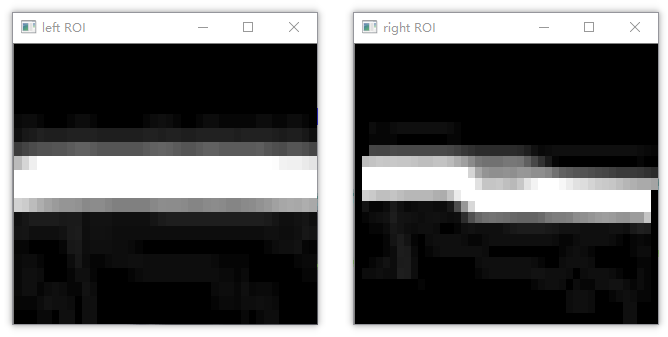
提取后的边缘如下图所示:
RANSAC直线拟合算法
提取具有强度信息的边缘后,需要通过这些边缘点拟合出一条直线,在这里我用到了RANSAC算法。
RANSAC为Random Sample Consensus(随机采样一致)的缩写,算法的思想是:根据一组包含异样数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据。它由Fischler和Bolles于1981年最先提出。
RANSAC基本思想描述如下:
- 考虑一个最小抽样集的势为n的模型(n为初始化模型参数所需要的最小样本数)和一个样本集P,集合P的样本数#(P)>n,从P中随机抽取包含n个样本的P的子集S初始化模型M;
- 余集SC=P\S中与模型M的误差小于某一设定阈值t的样本集以及S构成S*。S*认为是内点集,它们构成S的一致集(Consensus Set);
- 若#(S*)≥N,认为得到正确的模型参数,并利用集S*(内点inliers)采用最小二乘等方法重新计算新的模型M*;重新随机抽取新的S,重复以上过程;
- 在完成一定的抽样次数后,若未找到一致集则算法失败,否则选取抽样后得到的最大一致集判断内外点,算法结束。
基于RANSAC的基本方法,我们可以进行一定的改进,借鉴统计与误差的思想,将其用于边缘图像的直线拟合。下面,将首先介绍该方法的总体流程,接着从种子点的选取、随机选取直线的数量、误差的计算方法三个方面详细论述。
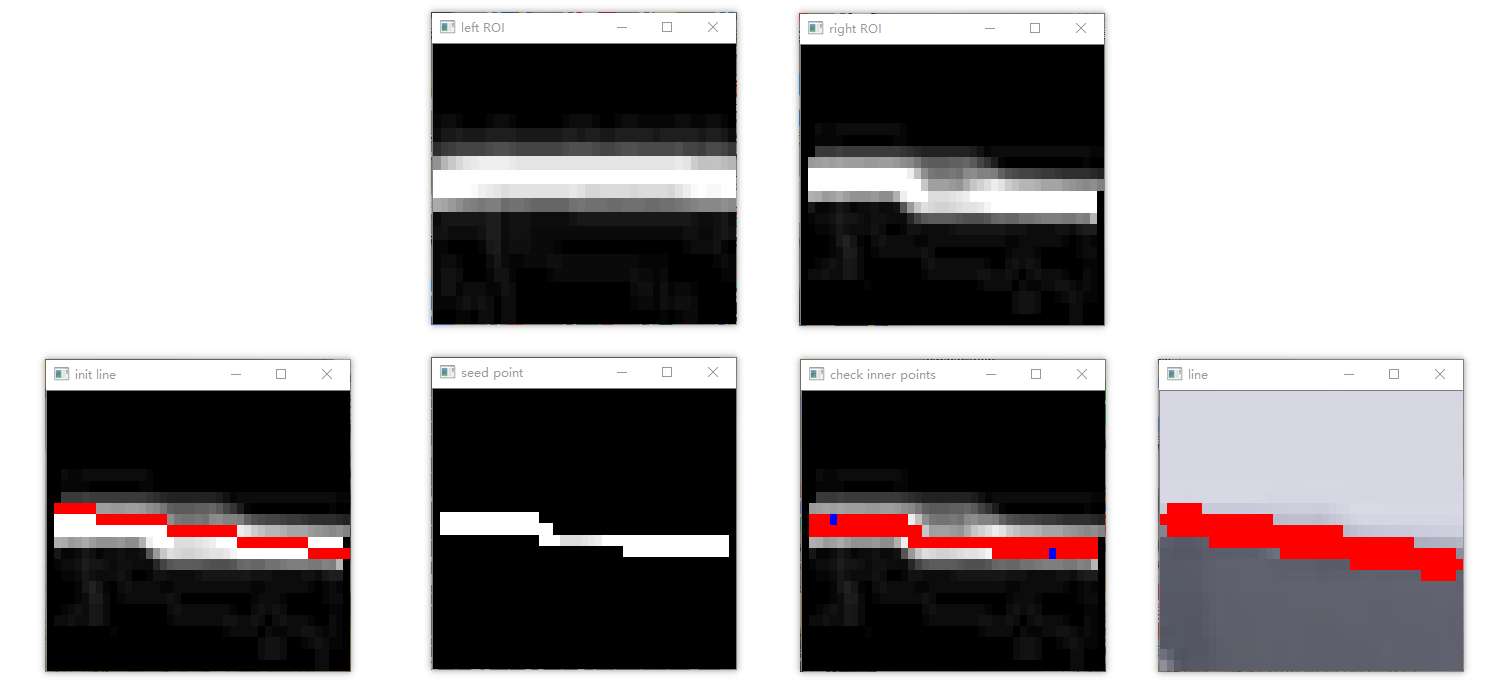
1. 算法流程
- 对边缘图像进行归一化处理,使其亮度处在某一范围内;
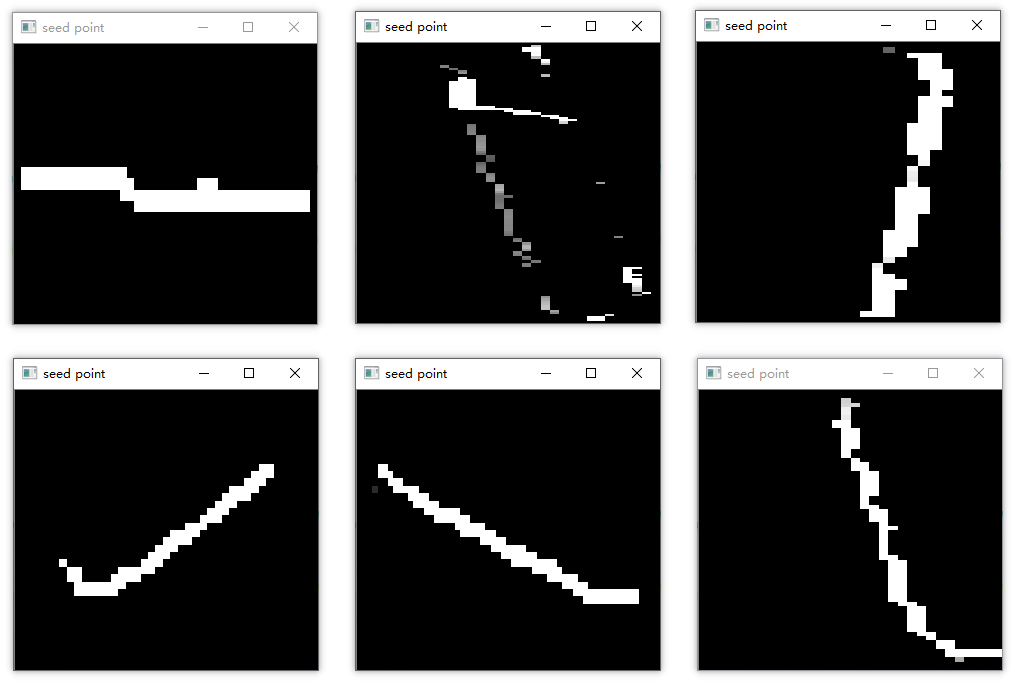
- 在边缘图像中选取一系列种子点,这些种子点与目标直线有着相似的分布,具有一定亮度信息;
- 从所有的种子点中随机选取两点()拟合直线,获得直线参数;
- 分别计算每个种子点与直线的距离
- 考虑亮度与距离,计算直线与所有种子点之间的标准差,其中,距离与误差成正比,亮度与误差成反比
- 重复次3-5步的运算,找到所拟合出的直线具有最小标准差的两个点,这两个点所连接的直线即为目标直线。
2. 种子点的选取
在对直线的大致位置进行预测后,得到一个缓冲区,缓冲区的中心线与目标直线具有相似的分布。
选取种子点可以在缓冲区的中心线附近沿着直线方向进行查找。
3. 随机选取直线的数量
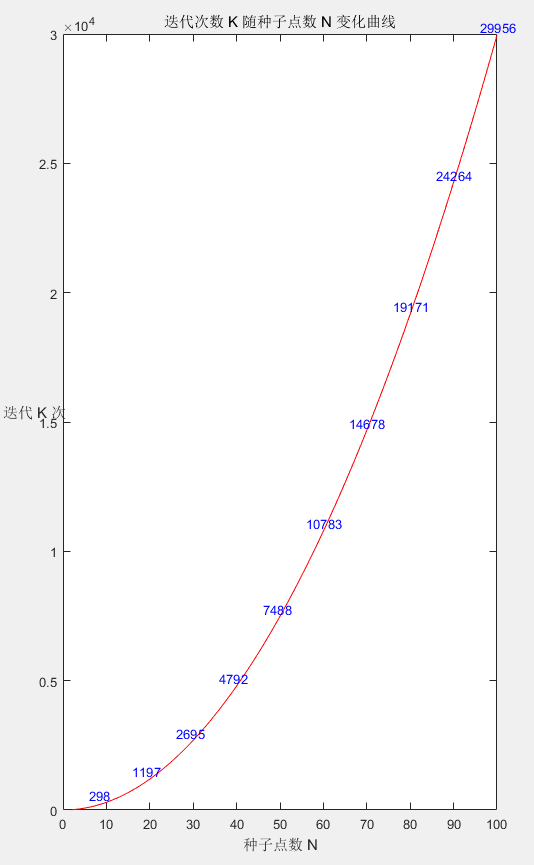
假设有个种子点(),其中包含两个最优的种子点,在所有点中随机选取,选中两个最优种子点的概率为
在次迭代中,每次迭代随机选取两个点进行拟合,要求拟合的所有直线中,包含最优直线的概率为,则
迭代次数K随种子点数N变化的曲线图如下所示(所有拟合直线中包含最优直线的概率):
4. 误差的计算方法
在所有参与直线拟合的种子点中,与直线的距离越远,说明该点是内点的可能性越小,误差越大;同时,种子点的亮度越低,说明该点是边缘点的可能性越小,误差越大。因此可以得到单个种子点的误差计算公式:
其中,是种子点到直线的距离,是种子点的亮度值。直线整体误差的标准差的计算公式为:
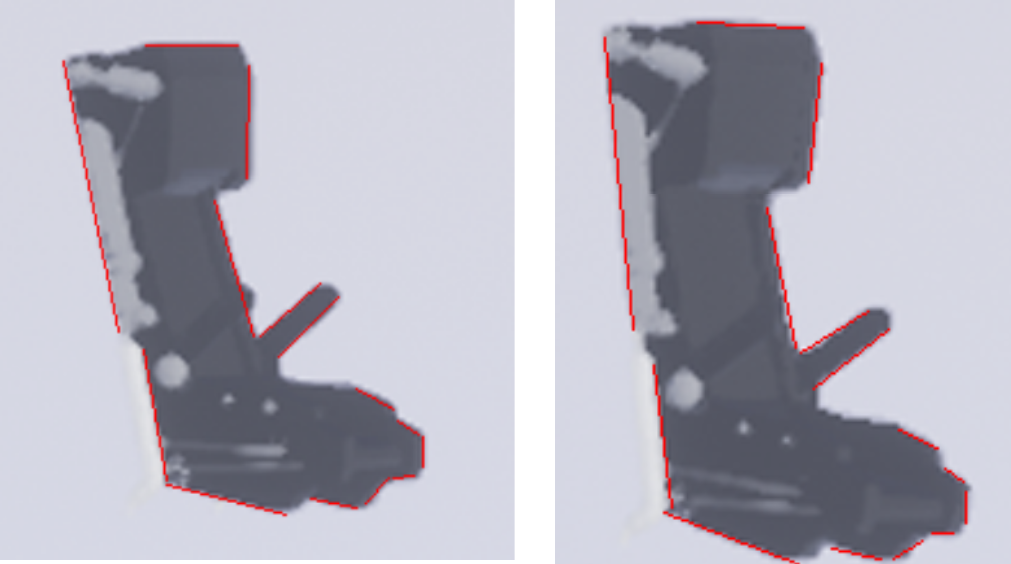
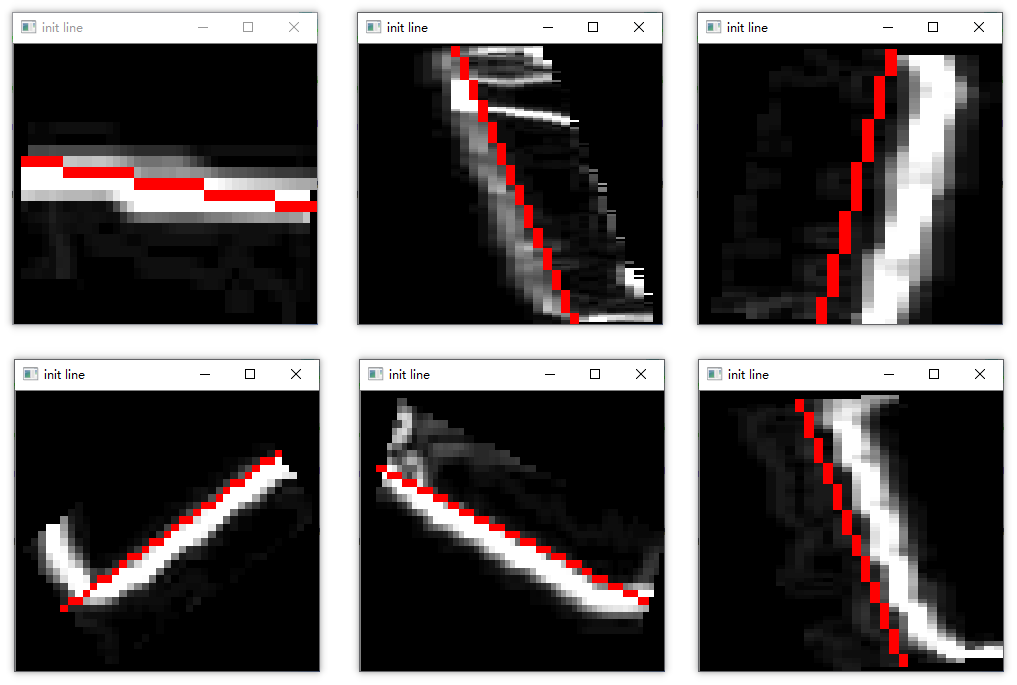
5. 提取与跟踪的结果